Манипулятор для перемещения грузов



MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе
Дата прекращения действия патента: 26.03.2014
Начальная стоимость от $100 000.

Экслюзивная лицензия на территорию РФ. Изобретение...![]()
| |
MM4A Досрочное прекращение действия патента из-за неуплаты в установленный срок пошлины за поддержание патента в силе
Дата прекращения действия патента: 26.03.2014
Начальная стоимость от $100 000.
Манипулятор относится к механизмам для горизонтального перемещения грузов, например автомобилей в автоматизированных паркингах. Манипулятор содержит платформу, транспортер, тележку с поддоном и подъемным устройством и управляющее устройство. Система из звездочек, цепной передачи и трансмиссии обеспечивает работу устройства от одного двигателя. Упрощается конструкция устройства. 6 з.п. ф-лы, 28 ил.
Изобретение относится к машиностроению, к механизмам для горизонтального перемещения грузов.
Манипулятор предназначается для горизонтального переноса груза и выполнения других действий без дополнительных двигателей.
Известна транспортная система склада высокоплотного ярусного хранения груза на поддонах, патент RU 2323149 C1. Рассмотрим лишь механизмы, обеспечивающие горизонтальное перемещение груза. Транспортная система имеет грузовую тележку с установленным на ней двигателем и грузозахватное устройство с двумя двигателями: один для колес грузозахватного устройства и другой для цепного механизма подъема и установки поддона.
К недостаткам транспортной системы относятся: сложная система управления с применением дальномеров и различных датчиков. В системе предусмотрено сразу три двигателя, которые обеспечивают движение односложных механизмов. Стоимость на разработку, изготовление и эксплуатацию системы будет высокой.
Предлагаемый манипулятор устраняет названные недостатки. Сущность манипулятора состоит в том, что для перемещения и других действий может использоваться один двигатель.
Разнообразные предметы, материалы, жидкости и прочие вещества, требующие переноса из одного места в другое, далее будем именовать грузами. Грузы при хранении размещаются в ячейках стеллажей хранилища в бункерах, контейнерах, клетях и т.п., далее именуемыми поддонами. Для переноса грузов с места хранения на место загрузки и выгрузки используются транспортные средства, которые будем называть тележками. Перенос груза на тележках из одного места в другое далее именуем перемещением. Установка груза на место хранения, выгрузка и другая работа, не относящаяся к горизонтальному перемещению, будет называться другими действиями. На тележке иногда устанавливают дополнительно двигатели (электрические, гидравлические или другие), для выполнения других действий. Например, в сельском хозяйстве, в горизонтальных транспортерах - с перемещением корма на тележках необходимо наклонять дно тележки (или бункера на нем) для дозированной выгрузки корма, или в автоматизированных гаражах - с перемещением автомобилей на поддонах надо опускать поддоны на место хранения и поднимать их для дальнейшего перемещения.
Заявленное изобретение решает главную задачу - получение простого и удобного механизма, обеспечивающего перемещение грузов в ограниченном пространстве, не требующего высокой квалификации персонала и высокоточного дорогостоящего оборудования при промышленном изготовлении и ремонте.
Сущность изобретения состоит в том, что в нем использованы простые конструктивные решения, упрощающие изготовление и эксплуатацию, оно основано на использовании транспортера, обеспечивающего перемещение груза, и другие действия с грузом с применением одного двигателя.
Технический результат достигается благодаря тому, что применяются транспортеры, перемещаемые цепной передачей и с помощью цепи передающие усилие для перемещения тележки с поддонами, а также для вращения элементов подъемного устройства тележки, обеспечивающего подъем-спуск поддонов.
Конструктивное решение предлагаемого изобретения раскрывается представленными эскизами основного и альтернативных вариантов.
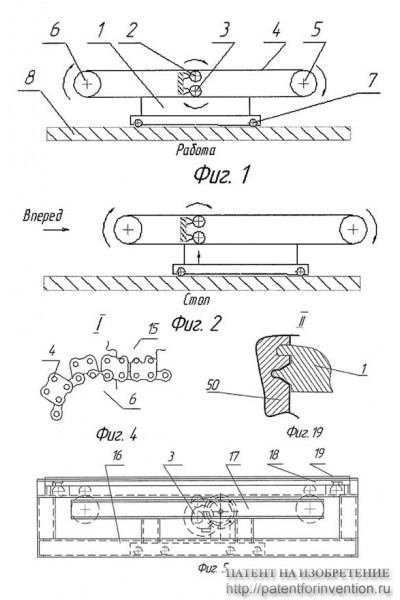
На фиг.1 дана схема, раскрывающая принцип работы манипулятора. Корпус 1 транспортера, ведущая звездочка 2 цепи, управляемое тормозное устройство 3 цепи с режимом работы "Стоп" - блокировка вращения и "Работа" - свободное вращение, далее именуемое элементом управления, цепь 4 с возможностью одновременного зацепления разными звездочками с двух сторон, ведомые звездочки цепи передняя 5 и задняя 6, колеса-ролики 7, облегчающие перемещение транспортера по рельсам 8. Ведущая звездочка 2, элемент управления 3 и рельсы 8 закреплены на платформе. Остальные элементы составляют транспортер, перемещающийся на платформе по рельсам 8.
На фиг.2 - элемент управления 3 в положении "стоп", нижние звенья цепи заблокированы и не передвигаются. В этом случае вращение ведущей звездочки 2 по часовой стрелке передвигает транспортер 1 вперед, т.к. цепь удерживается ведомыми звездочками цепи 5 и 6, закрепленными на подвижном транспортере. Вращение ведущей звездочки будет перемещать верхнюю часть цепи слева направо вместе с транспортером, ведь цепь 4 не может перемещаться как в обычной цепной передаче.
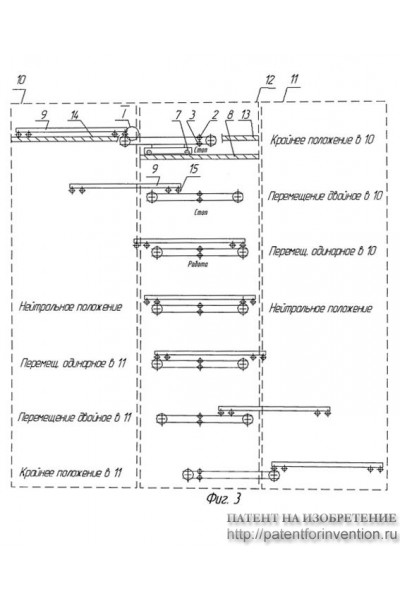
На фиг.3 - схема перемещения корпуса 9 тележки в ограниченном пространстве, например, на стеллажах хранилищ. Здесь пунктирными линиями показаны границы стеллажей 10 и 11 и между ними зона 12 манипулятора. Перемещение тележки из стеллажа 10 на стеллаж 11 показано поэтапно, каждый последующий этап показан ниже предыдущего. На этапах колеса-ролики 7, рельсы 8 и направляющие элементы 13 и 14, по которым перемещается тележка на манипуляторе, и стеллажах 10 и 11 не показываются, т.к. будут мешать восприятию.
Крайнее положение в 10: тележка находится в стеллаже 10. На фиг.4 показано место I с увеличением. Транспортер переводится к тележке с выдвинутой ведомой звездочкой 6 цепи, и внешней стороной цепи 4 плавно входит в зацепление с передней звездочкой 15 тележки, которая не касается звездочки 6.
Перемещение двойное в 10: после зацепления с цепью звездочка 15 тележки блокируется от вращения, что делает звездочку 15 толкателем корпуса 9 тележки. Элемент управления переводится в режим "стоп", и вращение ведущего колеса по часовой стрелке перемещает в зону 12 транспортер и тележку.
Перемещение одинарное в 10: элемент управления переводится в режим "работа", и транспортер прекращает перемещение. В это время тележка движется только благодаря цепи с толкателем в виде звездочки 15.
Нейтральное положение. Транспортер и тележка находятся в середине зоны 12. В таком положении манипулятор можно поднимать или опускать с этажа на этаж, перемещать вдоль стеллажей на другие ячейки.
Перемещение одинарное в 11, перемещение двойное в 11 и крайнее положение в 11 аналогично работе в 10 и отдельно не поясняются.
ВАРИАНТ С ОДНИМ ТРАНСПОРТЕРОМ
Манипулятор представлен на фиг.5, 6 и 7
На фиг.5 показан эскиз одной из разновидностей манипулятора, вид сбоку, где платформа 16, элемент управления 3, механизм транспортера 17, тележка 18 и поддон 19.
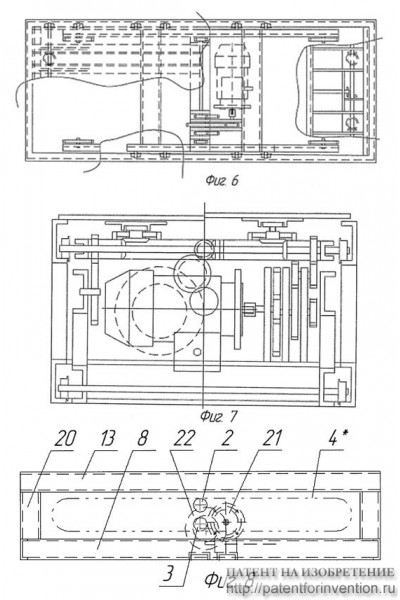
На фиг.6 и фиг.7 вид сверху и вид с торца манипулятора фиг.5. с вырезанными контурами элементов, для удобства рассмотрения.
Платформа представлена на фиг.8, 9 и 10.
На фиг.8 вид сбоку на платформу 16, составленную из корпуса платформы 20 и закрепленными на ней, двигателем 21, редуктором 22, направляющих элементов 8 для перемещения транспортера и направляющих элементов 13 для перемещения тележки по платформе в зоне 12 (промежуточное звено между направляющими элементами 14 в стеллажах 10 и 11). * - цепь 4 показана для сведения, она в состав платформы не входит.
На фиг.9 и 10 платформа 16 с двумя цепями 4, вид сверху и с торца с вырезанными элементами для удобства рассмотрения.
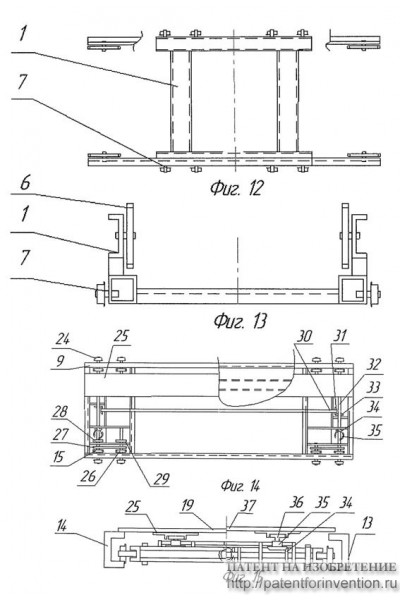
Транспортер показан на фиг.11, 12 и 13, соответственно вид сбоку, сверху и с торца.
Тележка с поддоном показана на фиг.14, 15 и 16, соответственно вид сверху, с торца и сбоку.
В состав тележки входят корпус тележки 9, несущие колеса 24, рама 25 и различные элементы каркаса.
На фиг.17 представлен срез тележки с частью трансмиссии тележки.
Вал 38 соединен жестко со звездочкой 15, сцепкой 27 и управляемым элементом 28, но может вращаться в элементе каркаса 41. Управляемый элемент 28 (может быть со сцепной муфтой) в состоянии без управляющего воздействия жестко соединяет вал 38 с валом 32, а при управляющем воздействии разъединяет вал 38 от вала 32.
Вал 39 соединен жестко со звездочкой 26, сцепкой 27 и управляемым элементом 29, но может вращаться в элементе каркаса 41. Управляемый элемент 29 (может быть со сцепной муфтой) в состоянии без управляющего воздействия соединяет жестко вал 39 с валом 40, а при управляющем воздействии разъединяет вал 39 от вала 40.
Вал 40 соединен жестко с элементом каркаса 42. Элементы каркаса 43-46 образуют корпус тележки.
Описание принципа работы.
Схема работы по фиг.1 и 8. Двигатель 21 и редуктор 22 закреплены на платформе. Каждая из двух ведущих звездочек 2 закрепляется на вал редуктора 22 через специальные управляемые муфты (на схеме муфты не показаны). Каждая муфта сцепляет или расцепляет свою ведущую звездочку с валом редуктора 22, т.е. при работающем двигателе одна ведущая звездочка может вращаться и перемещать свою цепь, а вторая может быть без движения и не перемещать вторую цепь. Если обе ведущие звездочки сцеплены муфтами за вал редуктора, а два управляющих устройства 3 установлены в режим «стоп», то редуктор, муфты, ведущие звездочки, цепь и ведомые звездочки будет превращать вращательное движение двигателя в поступательное движение транспортера (и верхней части цепей в т.ч.).
Транспортер может перемещаться на колесах-роликах 7 по рельсам 8 в пределах платформы слева направо, и очевидно, справа налево, если двигатель вращается в обратную сторону. Можно применять два двигателя, тогда каждый двигатель будет перемещать только одну цепь, в этом случае можно обойтись без муфт, соединяющих ведущие звездочки 2 с валом редуктора 22.
Тележка перемещается на несущих колесах 24, которые перекатываются по нижней полке направляющих элементов 13 и/или 14 соответственно платформы и/или стеллажа.
Четыре основных вида состояния трансмиссии тележки.
Стояночный режим: тележка стоит. В стояночном режиме благодаря управляемым элементам 28 и 29 вся трансмиссия соединена на неподвижный вал 40, а значит, неподвижна.
Зацепление с транспортером: тележка стоит. Подается управляющее воздействие на элементы 28 и 29, благодаря чему звездочки 15 и 26 могут вращаться и плавно могут войти в надвигающуюся на них цепь с двухсторонним зацеплением (фиг.4).
Перемещение с транспортером: тележка перемещается. Снимается управляющее воздействие с элементов 28 и 29, что приводит трансмиссию в стояночный режим. Благодаря этому звездочки 15 и 26 не могут вращаться и становятся толкателями, и транспортер с цепью благодаря им перемещает тележку.
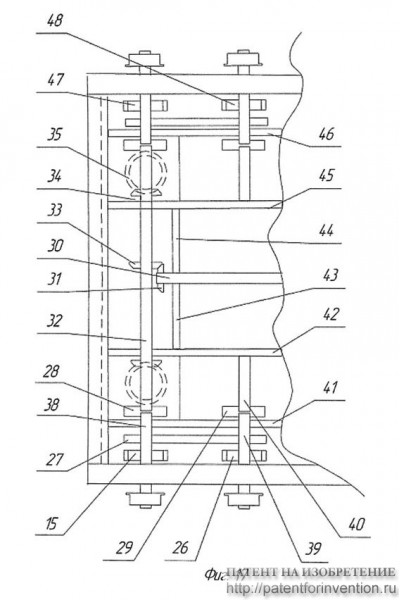
Подъем-спуск поддона: тележка стоит, поддон 19 лежит на верхних полках элемента 14. Благодаря транспортеру тележка закатывается под поддон 19. Подается управляющее воздействие на элемент 28, и вал 32 освобождается для вращения. Цепь, находящаяся в зацеплении со звездочками 15 и 26, останавливается и блокируется от перемещения торможением ведомых звездочек 5 и 6 специальными муфтами (на чертежах не показаны). Цепь, находящаяся в зацеплении со звездочками 47 и 48, передает вращение на эти звездочки от ведущих звездочек 2, если тормозное устройство 3 переведено в режим «работа». Таким образом, одна цепь удерживает тележку на месте, а вторая цепь передает вращение на вал 32. В свою очередь вал 32 благодаря зубчатым колесам 33 и 34 передает вращение на зубчатые колеса 31 и 35, а они соответственно через центральный вал и колеса 35 передают движение на подъемные устройства 36 (см. фиг.15), расположенные по углам тележки и закрепленные попарно за раму 25. Таким образом, подъемное устройство поднимает раму вверх или опускает ее вниз вместе с поддоном. Рама поднимает поддон 19 и удерживает его во время перемещения (для удобства восприятия в поднятом положении поддону дан номер 37, см. фиг.15). Тележка может начать перемещение с поднятой рамой 25 и поддоном 19.
Режим перемещения уже описан, но в данном случае тележка будет перемещаться с поднятым поддоном 37 с грузом или без него (см. фиг.15). Необходимо снять управляющее воздействие с элемента 28, что приведет всю трансмиссию тележки в режим без вращения, и звездочки 15, 26, 47 и 48 будут служить толкателями тележки. Одновременный запуск обеих цепей поведет транспортер, тележку и поддон в необходимом направлении. Доставив поддон в требуемое место, подъемное устройство с рамой спускается, и поддон становится на верхние полки направляющих элементов. Конструкция поддона может иметь элементы, обеспечивающие хранение на нем груза, и элементы, обеспечивающие удержание груза или без них, и отдельно не описываются, так же, как не описываются зубчатые колеса или сцепные муфты.
ВАРИАНТ С ДВУМЯ ТРАНСПОРТЕРАМИ (АЛЬТЕРНАТИВНЫЙ)
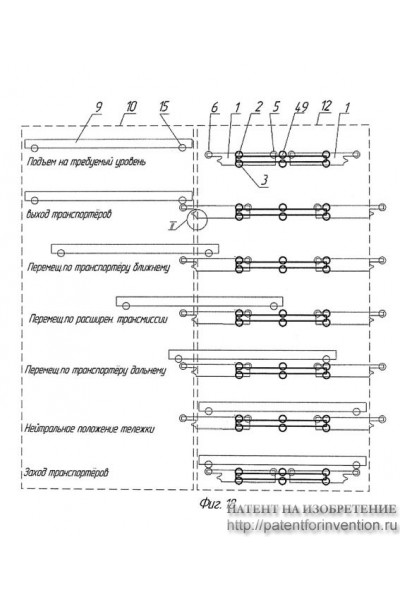
На фиг.18 показана схема альтернативного варианта манипулятора с использованием двух транспортеров, ближнего и дальнего, с расширенным вариантом трансмиссии 49. Направляющие на стеллажах и платформе не показаны.
Здесь представлены этапы перемещения корпуса тележки с использованием звездочки 15, заблокированной от вращения и используемой как толкатель.
Подъем на требуемый уровень: платформа подводится на требуемый уровень стеллажа 10, где стоит тележка, которую необходимо переместить на платформу в зону 12 для дальнейшего перемещения в другое место.
Выход транспортеров: вращение ведущих звездочек 2 при режиме "стоп" элемента управления 3 обеспечивает перемещение корпусов транспортеров в разные стороны. При этом на корпусе транспортеров есть специальные выступы для захода в улавливающие пазы 50 на стеллажах. На фиг.19 место I фиг.18 показан специальный выступ корпуса транспортера в улавливающем пазе 50 стеллажа. Специальный выступ позволяет использование подъемных устройств без точного выравнивания при подходе на требуемый уровень. Транспортеры своим зацеплением также заменяют стопорные устройства подъемного механизма. Зайдя в пазы 50 специальным выступом, транспортер обеспечивает фиксацию платформы механизма и достаточно точное совпадение направляющих элементов, по которым будет перемещаться тележка.
Перемещение по транспортеру ближнему: тележка перемещается цепью ближнего транспортера.
Перемещение по расширенной трансмиссии: тележка перемещается цепью расширенной трансмиссии 49.
Перемещение по транспортеру дальнему: тележка перемещается цепью дальнего транспортера.
Нейтральное положение тележки: тележка остановлена в нейтральном положении, контуры тележки полностью находятся в зоне 12 на платформе.
Заход транспортеров: тележка на платформе, транспортеры перемещаются на платформу и занимают нейтральное положение. Специальные выступы вышли из улавливающих пазов 50 и подъемник может поднимать или опускать платформу манипулятора.
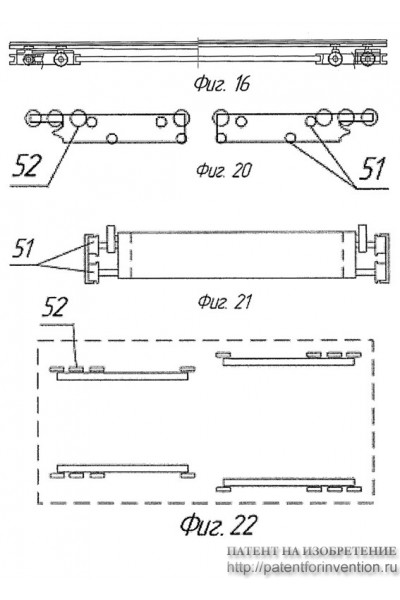
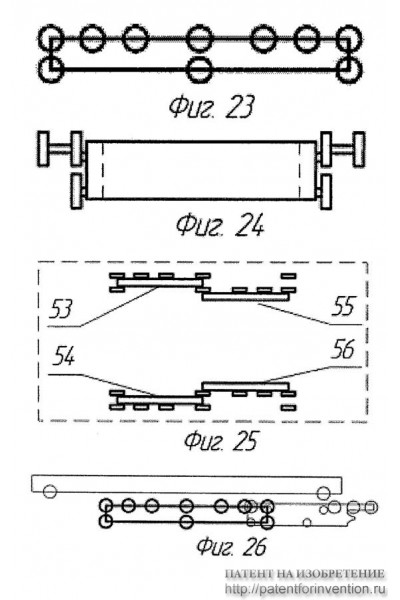
На Фиг.20-22 - вид сбоку, с торца и сверху на ближний и дальний транспортеры. Здесь в качестве элементов, облегчающих перемещение транспортера, применяются два ряда роликов 51. Дополнительно в цепной передаче имеются поддерживающие звездочки цепи 52. На виде сверху здесь и далее пунктиром задан контур платформы, на которой располагаются транспортер.
На фиг.23-25 вид сбоку, с торца и сверху на расширенную трансмиссию 49. Следует отметить, что расширенная трансмиссия состоит из четырех частей, две на работу с ближним транспортером, левая 53 и правая 54, и две с дальним транспортером, левая 55 и правая 56. Членение на ближнюю и дальнюю половины обусловлено необходимостью выдвигать в разные стороны ближний и дальний транспортеры. Движение одной цепи по обеим сторонам с режимом "стоп" на каждой половине будет невозможно.
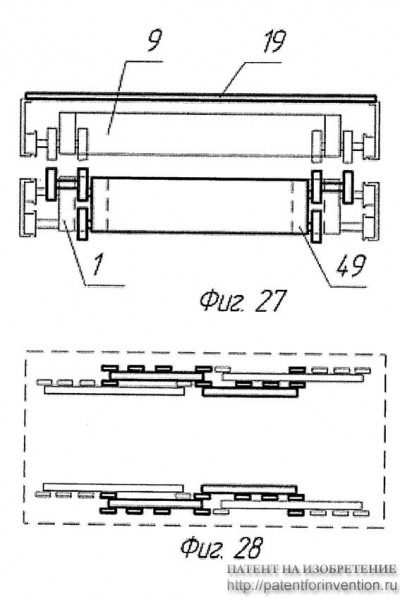
На фиг.26-28 вид сбоку, с торца и сверху на расширенной трансмиссии 49 и транспортера 1 совместно с тележкой 9 и поддоном 19.
Возможен другой вариант манипулятора - без поддонов.
В этом случае груз размещается не тележками на поддонах, а на тележках-поддонах с упрощенной конструкцией. В упрощенных тележках-поддонах отсутствует подъемное устройство для подъема-спуска рамы и собственно рама, но вместо них на тележке-поддоне будет плоский элемент, выполняющий функцию дна или пола, на которой будет располагаться груз. Иначе, вместо двух компонентов манипулятора, тележки и поддона, альтернативный вариант предполагает один компонент тележку-поддон, совмещающий в себе и тележку и поддон.
Технический результат достигнут, заявленное изобретение является простым механизмом, что упрощает его изготовление и эксплуатацию. Манипулятор с применением транспортера на цепной передаче позволяет перемещать грузы одним двигателем.
Все элементы манипулятора могут быть изготовлены промышленным образом, просты в эксплуатации и совместно с автоматизированной системой управления могут быть использованы как средство механизации на стеллажах для хранения разного рода грузов.
1. Манипулятор для перемещения грузов, отличающийся тем, что состоит, по меньшей мере, из одной платформы, в составе, по меньшей мере, одного корпуса платформы, включающего направляющие элементы для перемещения тележки, рельсы для перемещения транспортера, и закрепленные на ней двигатель, по меньшей мере, с одним редуктором, по меньшей мере, с одной ведущей звездочкой, обеспечивающими передачу вращения от двигателя на последующие элементы манипулятора, по меньшей мере, одного управляющего устройства, обеспечивающего управление движением цепи и транспортера, по меньшей мере, из одного транспортера, в составе, по меньшей мере, одного корпуса транспортера с закрепленными на нем колесами-роликами, облегчающими перемещение транспортера по рельсам платформы, по меньшей мере, одной пары ведомых звездочек, поддерживающих цепь с двойным зацеплением, обеспечивающих прием вращения от ведущих звездочек и преобразование его в перемещение транспортера, и передачу движения на последующие элементы манипулятора, элементами, обеспечивающими выравнивание платформы механизма на требуемом уровне и ее фиксацию или без них, по меньшей мере, из одной тележки, включающей корпус тележки с закрепленными на нем несущими колесами, обеспечивающими перемещение тележки по направляющим элементам платформы и/или стеллажей, по меньшей мере, одной трансмиссией, обеспечивающей прием движения от цепной передачи и передачу его на, по меньшей мере, одно подъемное устройство, по меньшей мере, с одной рамой, обеспечивающих подъем, удержание во время перемещения и спуск поддона с грузом или без него, по меньшей мере, из одного поддона, включающего, по меньшей мере, один элемент, обеспечивающий хранение на нем груза и, по меньшей мере, один элемент, обеспечивающий удержание груза или без него, по меньшей мере, из одного элемента управления, обеспечивающего управление манипулятором и/или отдельных его частей.
2. Манипулятор для перемещения грузов по п.1, отличающийся тем, что состоит из двух и более платформ, на каждой из которых закреплен двигатель с двумя и более редукторами или без них.
3. Манипулятор для перемещения грузов по п.1, отличающийся тем, что платформа включает два и более транспортера, две и более ведущие звездочки, два и более других элемента, обеспечивающих перемещение тележки и передачу движения на последующие элементы манипулятора.
4. Манипулятор для перемещения грузов по п.1, отличающийся тем, что вместе тележками и поддонами применяются поддон-тележки без рамы, подъемных устройств и трансмиссии, обеспечивающая и перемещение, и хранение груза.
5. Манипулятор для перемещения грузов по п.1, отличающийся тем, что из двух и более поддонов, каждый из которых включает два и более элемента, обеспечивающих хранение на нем груза, и два и более элемента, обеспечивающих удержание груза или без них.
6. Манипулятор для перемещения грузов по п.1, отличающийся тем, что состоит из двух и более элементов управления.
7. Манипулятор для перемещения грузов по п.1, отличающийся тем, что разнообразия, указанные в пп.2-6, применяются в различных сочетаниях.
На данный момент комментариев нет.
Только зарегистрированные пользователи могут оставлять комментарии и оценки.
| |



Сегодня 11. 02. 2026
Copyright © 2011 - 2026 Патент на изобретение. Все права защищены.















